B2 - Analytische Geometrie
1
Ein Bildschirmschoner zeigt einen sich drehenden Würfel, der sich in einem (auf dem Monitor nicht sichtbaren) dreidimensionalen Koordinatensystem bewegt. Für die Animation des Würfels und die Darstellung der Beleuchtungsverhältnisse sind verschiedene Berechnungen nötig.
Einige dieser Berechnungen sollen im Folgenden an einem einfachen Beispiel durchgeführt werden. Zum Anfangszeitpunkt besitzen die Punkte  ,
,  , und
, und  der Grundfläche die folgenden Koordinaten:
der Grundfläche die folgenden Koordinaten:
 ,
,  und
und 
, , und der Grundfläche die folgenden Koordinaten:
, und
1.1
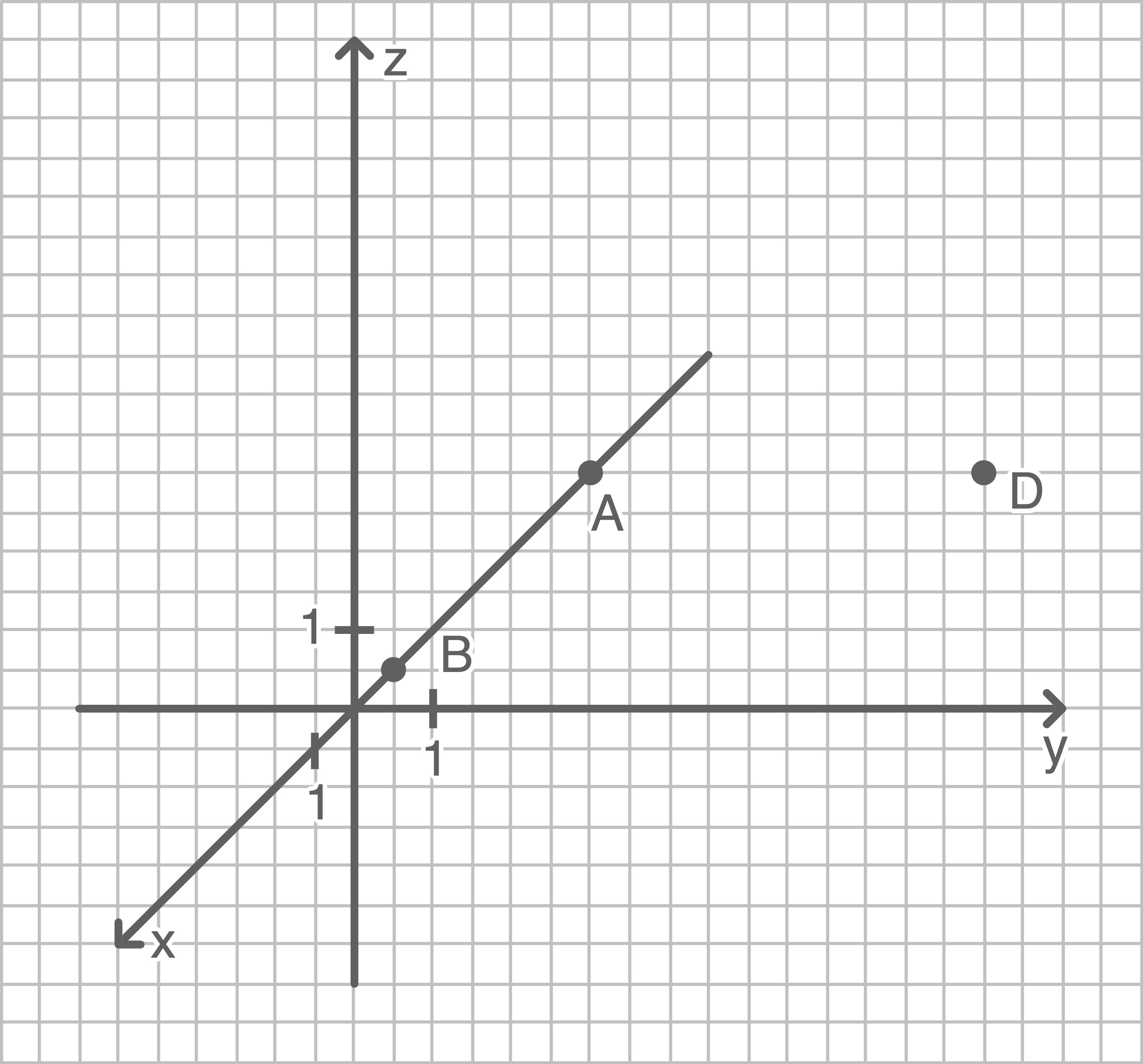
Zeichne die Punkte  und in ein selbst erstelltes Koordinatensystem ein, wie es in Abbildung 1 dargestellt ist.
Gib die Koordinaten der übrigen Eckpunkte des Würfels an und zeichne das Bild des Würfels.
und in ein selbst erstelltes Koordinatensystem ein, wie es in Abbildung 1 dargestellt ist.
Gib die Koordinaten der übrigen Eckpunkte des Würfels an und zeichne das Bild des Würfels.
und in ein selbst erstelltes Koordinatensystem ein, wie es in Abbildung 1 dargestellt ist.
Gib die Koordinaten der übrigen Eckpunkte des Würfels an und zeichne das Bild des Würfels.
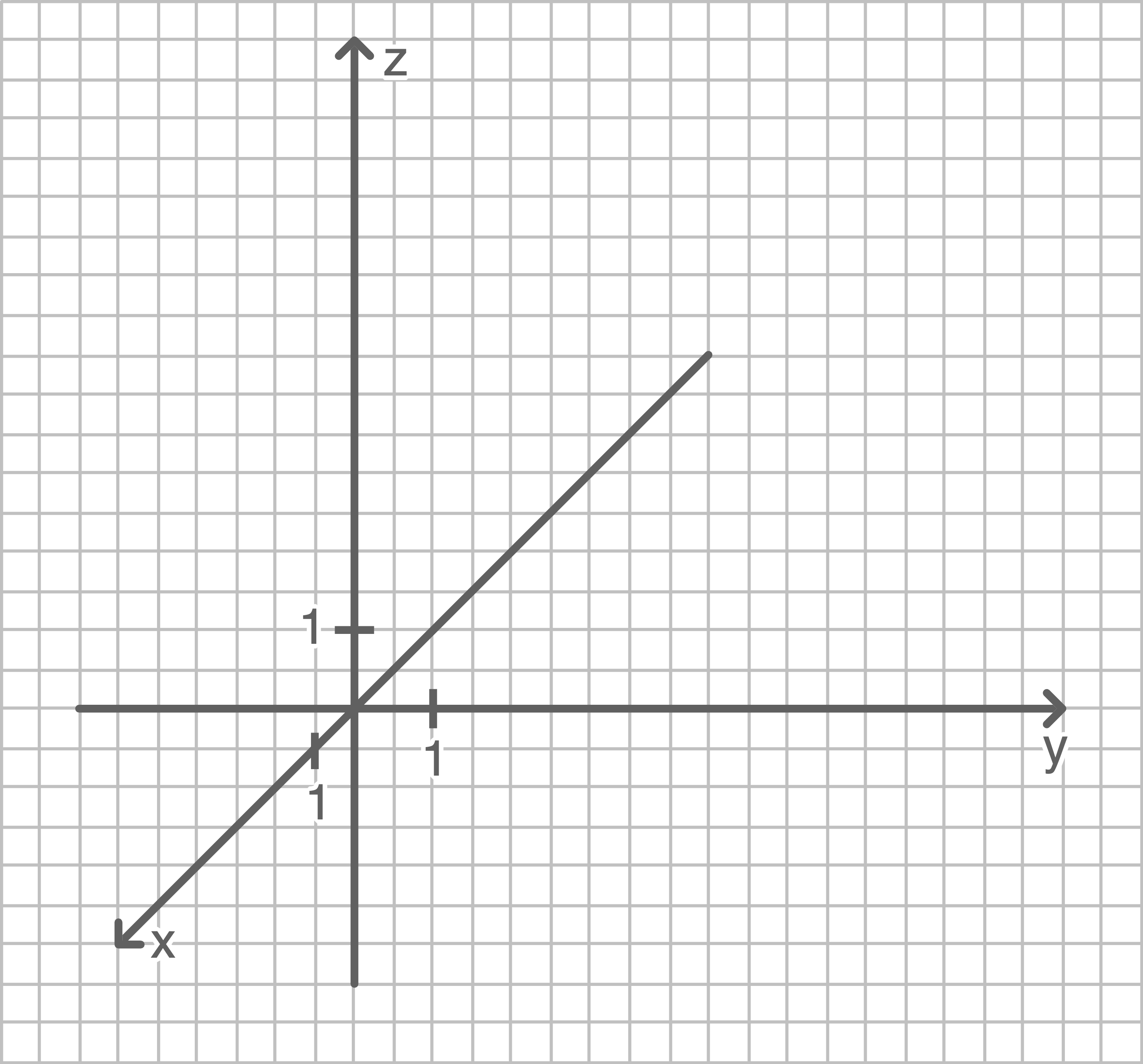
Abbildung 1
(4 BE)
1.2
Im Punkt  befindet sich eine punktförmige Lichtquelle, durch die ein Schatten des Würfels auf der
befindet sich eine punktförmige Lichtquelle, durch die ein Schatten des Würfels auf der  -Ebene entsteht. Dabei wird unter anderem der Eckpunkt
-Ebene entsteht. Dabei wird unter anderem der Eckpunkt  in die -Ebene projiziert.
Berechne die Koordinaten des Bildpunktes.
in die -Ebene projiziert.
Berechne die Koordinaten des Bildpunktes.
befindet sich eine punktförmige Lichtquelle, durch die ein Schatten des Würfels auf der -Ebene entsteht. Dabei wird unter anderem der Eckpunkt in die -Ebene projiziert.
Berechne die Koordinaten des Bildpunktes.
(5 BE)
1.3
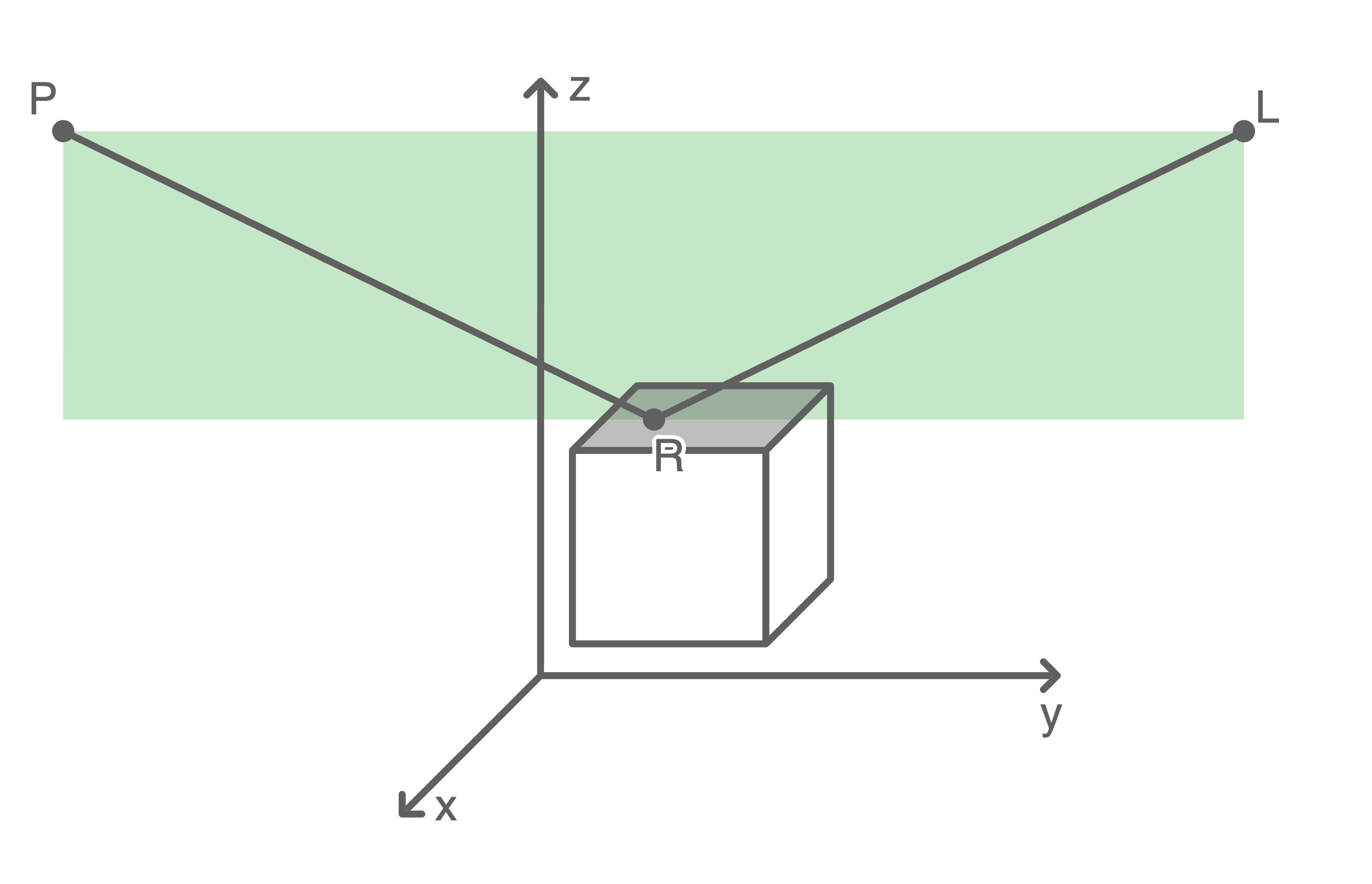
Ein Beobachter im Punkt  sieht die Reflexion der punktförmigen Lichtquelle
sieht die Reflexion der punktförmigen Lichtquelle  aus Aufgabe 1.2 im Punkt
aus Aufgabe 1.2 im Punkt  auf der Würfeloberseite.
Um die Position des Punktes
auf der Würfeloberseite.
Um die Position des Punktes  auf der Oberseite des Würfels zu bestimmen, benötigt man eine Ebene
auf der Oberseite des Würfels zu bestimmen, benötigt man eine Ebene  durch
durch  und , die senkrecht zur Oberseite des Würfels steht. Der Punkt erfüllt dann die beiden folgenden Bedingungen:
und , die senkrecht zur Oberseite des Würfels steht. Der Punkt erfüllt dann die beiden folgenden Bedingungen:
 liegt auf der Schnittgeraden
liegt auf der Schnittgeraden  der Ebene mit der Würfeloberseite.
der Ebene mit der Würfeloberseite.

sieht die Reflexion der punktförmigen Lichtquelle aus Aufgabe 1.2 im Punkt auf der Würfeloberseite.
Um die Position des Punktes auf der Oberseite des Würfels zu bestimmen, benötigt man eine Ebene durch und , die senkrecht zur Oberseite des Würfels steht. Der Punkt erfüllt dann die beiden folgenden Bedingungen:
liegt auf der Schnittgeraden der Ebene mit der Würfeloberseite.
Der Einfallswinkel zwischen dem einfallenden Lichtbündel und dem Normalenvektor der Würfeloberseite im Punkt ist gleich dem Ausfallswinkel zwischen dem reflektierten Lichtbündel und diesem Normalenvektor.
ist gleich dem Ausfallswinkel zwischen dem reflektierten Lichtbündel und diesem Normalenvektor.
1.3.1
Zeige, dass Bedingung  erfüllt.
erfüllt.
Bedingung erfüllt.
(7 BE)
1.3.2
Zeige, dass Bedingung  erfüllt.
erfüllt.
Bedingung erfüllt.
(6 BE)
2
Da bei der Berechnung der folgenden Animation des Würfels die entstehenden Koordinaten schwer einzuzeichnen sind, wird das 3-D-Koordinatensystem wie im Folgenden beschrieben in ein "deckungsgleiches" 2-D-Koordinatensystem abgebildet und die dann berechneten zweidimensionalen Koordinaten eingezeichnet.
Die Abbildungsmatrix  überführt die Koordinaten aus dem dreidimensionalen in den zweidimensionalen Raum.
Über das 3-D-Koordinatensystem wird ein 2-D-Koordinatensystem so gelegt, dass die Koordinatenursprünge übereinstimmen und die
überführt die Koordinaten aus dem dreidimensionalen in den zweidimensionalen Raum.
Über das 3-D-Koordinatensystem wird ein 2-D-Koordinatensystem so gelegt, dass die Koordinatenursprünge übereinstimmen und die  -Achse des 2-D-Koordinatensystems sich mit der
-Achse des 2-D-Koordinatensystems sich mit der  -Achse des 3-D-Koordinatensystems deckt. Die -Achse des 2-D-Koordinatensystems deckt sich mit der
-Achse des 3-D-Koordinatensystems deckt. Die -Achse des 2-D-Koordinatensystems deckt sich mit der  -Achse des 3-D-Koordinatensystems. Aus den dreidimensionalen Einheitsvektoren ergeben sich neue zweidimensionale Vektoren.
Beispiel: Der Einheitsvektor
-Achse des 3-D-Koordinatensystems. Aus den dreidimensionalen Einheitsvektoren ergeben sich neue zweidimensionale Vektoren.
Beispiel: Der Einheitsvektor  geht in den Vektor
geht in den Vektor  über.
Punkte können jetzt mit den Koordinaten des 2-D-Koordinatensystems angegeben werden.
Beispiel: Aus dem Punkt wird der Punkt
über.
Punkte können jetzt mit den Koordinaten des 2-D-Koordinatensystems angegeben werden.
Beispiel: Aus dem Punkt wird der Punkt  .
.
überführt die Koordinaten aus dem dreidimensionalen in den zweidimensionalen Raum.
Über das 3-D-Koordinatensystem wird ein 2-D-Koordinatensystem so gelegt, dass die Koordinatenursprünge übereinstimmen und die -Achse des 2-D-Koordinatensystems sich mit der -Achse des 3-D-Koordinatensystems deckt. Die -Achse des 2-D-Koordinatensystems deckt sich mit der -Achse des 3-D-Koordinatensystems. Aus den dreidimensionalen Einheitsvektoren ergeben sich neue zweidimensionale Vektoren.
Beispiel: Der Einheitsvektor geht in den Vektor über.
Punkte können jetzt mit den Koordinaten des 2-D-Koordinatensystems angegeben werden.
Beispiel: Aus dem Punkt wird der Punkt .
2.1
Bestimme die Abbildungsmatrix 
(4 BE)
2.2
Gegeben sei die Matrix  Erläutere die geometrische Wirkung der Abbildung, die durch die Matrix
Erläutere die geometrische Wirkung der Abbildung, die durch die Matrix  beschrieben wird.
beschrieben wird.
Erläutere die geometrische Wirkung der Abbildung, die durch die Matrix beschrieben wird.
(4 BE)
1.1
Punkte einzeichnen
 Koordinaten angeben
Koordinaten angeben
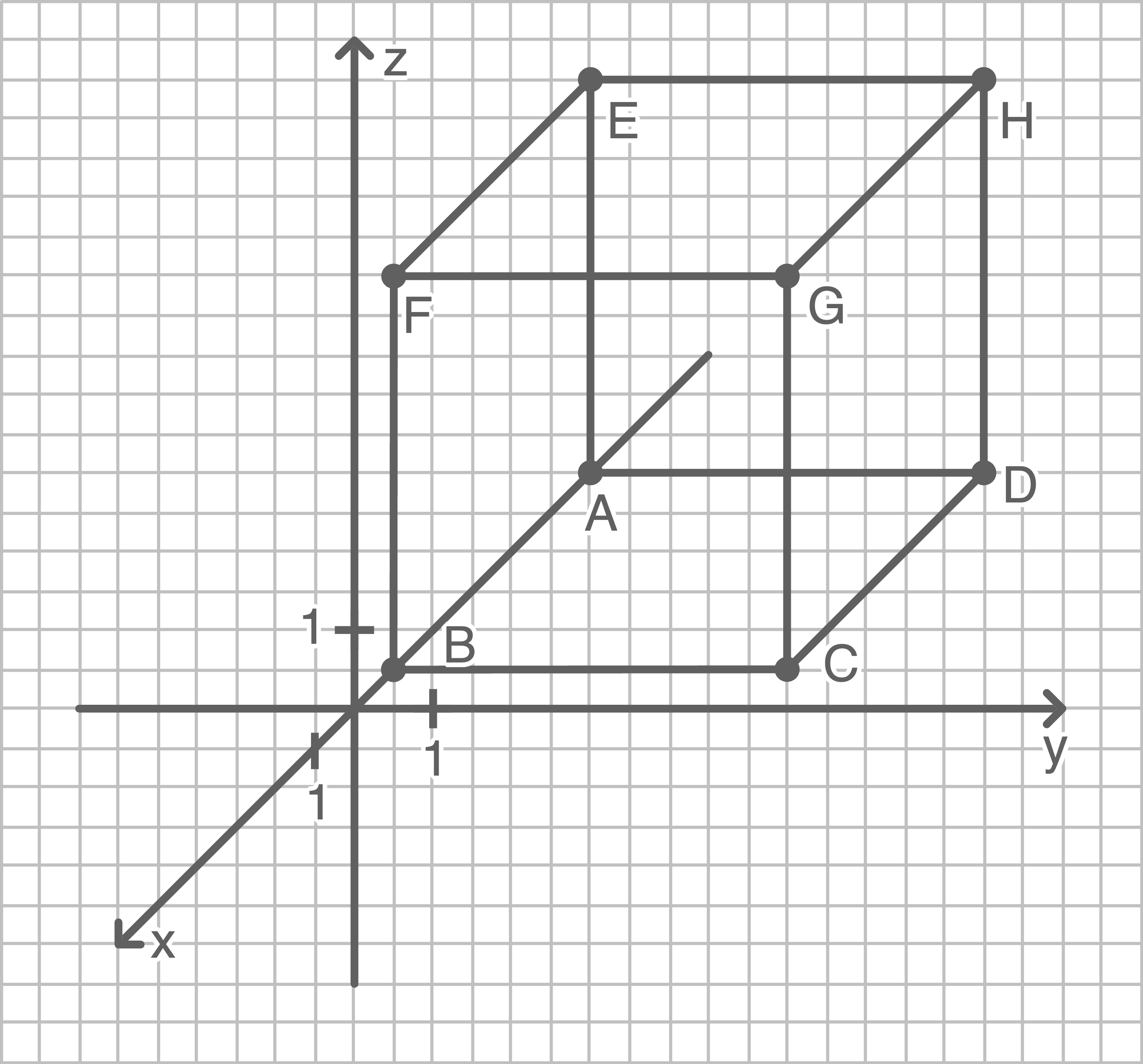
 stellt eine der Seiten der Würfelgrundfläche dar. Die Punkte und stimmen in den - und -Koordinaten überein und weichen in der -Koordinate um
stellt eine der Seiten der Würfelgrundfläche dar. Die Punkte und stimmen in den - und -Koordinaten überein und weichen in der -Koordinate um  voneinander ab. Folglich betragen die Seitenlänge und die Höhe des Würfels jeweils
voneinander ab. Folglich betragen die Seitenlänge und die Höhe des Würfels jeweils  Die Koordinaten der übrigen Eckpunkte ergeben sich also zu:
Die Koordinaten der übrigen Eckpunkte ergeben sich also zu:




 Würfel einzeichnen
Würfel einzeichnen
stellt eine der Seiten der Würfelgrundfläche dar. Die Punkte und stimmen in den - und -Koordinaten überein und weichen in der -Koordinate um voneinander ab. Folglich betragen die Seitenlänge und die Höhe des Würfels jeweils
Die Koordinaten der übrigen Eckpunkte ergeben sich also zu:
Würfel einzeichnen
1.2
1. Schritt: Geradengleichung aufstellen
Mit dem Ortsvektor  von
von  als Stützvektor und dem Verbindungsvektor
als Stützvektor und dem Verbindungsvektor  als Richungsvektor ergibt sich:
als Richungsvektor ergibt sich:
![\(\begin{array}[t]{rll}
g:\; \vec{x}&=& \overrightarrow{OE}+r\cdot\overrightarrow{LE}&\\[5pt]
&=& \begin{pmatrix}-4\\1\\6\end{pmatrix}+r\cdot\begin{pmatrix}36\\-22\\-20\end{pmatrix}
\end{array}\)](https://www.schullv.de/resources/formulas/4605080e277da40c8577a0b96597cb31373c610f4822e33297e319354fd292ea_light.svg) 2. Schritt: Schnittpunkt mit der
2. Schritt: Schnittpunkt mit der  -Ebene bestimmen
Eine Ebenengleichung der -Ebene ist beispielsweise:
-Ebene bestimmen
Eine Ebenengleichung der -Ebene ist beispielsweise:
 Einsetzen der -Koordinate der Geraden in
Einsetzen der -Koordinate der Geraden in  liefert nun:
liefert nun:
![\(\begin{array}[t]{rll}
z&=&0 &\quad \scriptsize \\[5pt]
6-20r&=&0 &\quad \scriptsize \mid +20r \\[5pt]
6&=& 20r &\quad \scriptsize \mid :20 \\[5pt]
\dfrac{3}{10}&=& r
\end{array}\)](https://www.schullv.de/resources/formulas/7530726b01436c66338d19a216454d9ddfb87152d7a880708ff034dca0c7445c_light.svg) Einsetzen von
Einsetzen von  in die Geradengleichung ergibt:
in die Geradengleichung ergibt:
![\(\begin{array}[t]{rll}
\overrightarrow{OE](https://www.schullv.de/resources/formulas/e26c6741e6aa2946f4d100c6309c171d1048d74899985a578c9f11b15029ebdc_light.svg) Der Bildpunkt besitzt somit die Koordinaten
Der Bildpunkt besitzt somit die Koordinaten 
von als Stützvektor und dem Verbindungsvektor als Richungsvektor ergibt sich:
2. Schritt: Schnittpunkt mit der -Ebene bestimmen
Eine Ebenengleichung der -Ebene ist beispielsweise:
Einsetzen der -Koordinate der Geraden in liefert nun:
Einsetzen von in die Geradengleichung ergibt:
Der Bildpunkt besitzt somit die Koordinaten
1.3.1
1. Schritt: Ebene  durch
durch  und
und  aufstellen
Ein Stützvektor von ist gegeben durch
aufstellen
Ein Stützvektor von ist gegeben durch  . Da senkrecht zur Würfeloberseite und somit senkrecht zu
. Da senkrecht zur Würfeloberseite und somit senkrecht zu  steht, ergeben sich die Richtungsvektoren zu
steht, ergeben sich die Richtungsvektoren zu  und
und  wobei
wobei  ein Normalenvektor der Ebene ist.
ein Normalenvektor der Ebene ist.
durch und aufstellen
Ein Stützvektor von ist gegeben durch . Da senkrecht zur Würfeloberseite und somit senkrecht zu steht, ergeben sich die Richtungsvektoren zu und wobei ein Normalenvektor der Ebene ist.
Raumskizze

![\(\begin{array}[t]{rll}
E_1: \overrightarrow{x} &=& \overrightarrow{OP}+r\cdot \overrightarrow{PL}+s\cdot\vec{n_2}& \\[5pt]
&=& \pmatrix{20\\-7\\16} +r\cdot \pmatrix{-40-20\\23-(-7)\\26-16}+s\cdot \pmatrix{0\\0\\1} & \\[5pt]
&=& \pmatrix{20\\-7\\16}+r\cdot \pmatrix{-60\\30\\10} +s\cdot \pmatrix{0\\0\\1}
\end{array}\)](https://www.schullv.de/resources/formulas/2b03822680b453d36f540bfdfa3415f9abf2f9152db1c68924346a33029c0585_light.svg)
 aufstellen
liegt um
aufstellen
liegt um  verschoben parallel zur -Ebene, eine Ebenengleichung folgt also mit
verschoben parallel zur -Ebene, eine Ebenengleichung folgt also mit  3. Schritt: Gleichung der Schnittgeraden
3. Schritt: Gleichung der Schnittgeraden  bestimmen
Einsetzen der -Koordinate von in liefert:
Einsetzen von
bestimmen
Einsetzen der -Koordinate von in liefert:
Einsetzen von 
![\(\begin{array}[t]{rll}
z&=&6 &\quad \scriptsize \\[5pt]
16+r\cdot10+s\cdot1&=&6 &\quad \scriptsize \mid -16 \quad \scriptsize \mid-s \\[5pt]
10r&=& -10-s &\quad \scriptsize \mid :10 \\[5pt]
r&=& -1-\dfrac{1}{10}s
\end{array}\)](https://www.schullv.de/resources/formulas/9bcd0e416e19a66a2398fcc6be6085508838b45bcf9aeb11f4b51016f765eb70_light.svg)
 in die Gleichung der Ebene ergibt nun:
4. Schritt: Punktprobe durchführen
Damit
in die Gleichung der Ebene ergibt nun:
4. Schritt: Punktprobe durchführen
Damit 
![\(\begin{array}[t]{rll}
g:&\vec{x}&=&\begin{pmatrix}20\\-7\\16\end{pmatrix}+\left(-1-\dfrac{1}{10}s\right)\cdot\begin{pmatrix}-60\\30\\10\end{pmatrix}+s\cdot\begin{pmatrix}0\\0\\1\end{pmatrix} &\quad \scriptsize \\[5pt]
&&=&\begin{pmatrix}20\\-7\\16\end{pmatrix}+\begin{pmatrix}60\\-30\\-10\end{pmatrix}+s\cdot\begin{pmatrix}6\\-3\\-1\end{pmatrix}+s\cdot\begin{pmatrix}0\\0\\1\end{pmatrix} &\quad \scriptsize \\[5pt]
&&=&\begin{pmatrix}80\\-37\\6\end{pmatrix}+s\cdot\begin{pmatrix}6\\-3\\0\end{pmatrix}
\end{array}\)](https://www.schullv.de/resources/formulas/b8bd5a1d245d171ca6bd4599800c29af0f35d539bc027e56ae7be3cbd6830f79_light.svg) auf der Schnittgeraden liegt, muss gelten:
Für
auf der Schnittgeraden liegt, muss gelten:
Für ![\(\begin{array}[t]{rll}
\overrightarrow{OR}&=&\begin{pmatrix}80\\-37\\6\end{pmatrix}+s\cdot\begin{pmatrix}6\\-3\\0\end{pmatrix} &\quad \scriptsize \\[5pt]
\begin{pmatrix}0\\3\\6\end{pmatrix}&=&\begin{pmatrix}80\\-37\\6\end{pmatrix}+s\cdot\begin{pmatrix}6\\-3\\0\end{pmatrix}&\quad \scriptsize \,\bigg \vert \, - \pmatrix{80\\-37\\6} &\quad \scriptsize \\[5pt]
\begin{pmatrix}-80\\40\\0\end{pmatrix}&=&s\cdot\begin{pmatrix}6\\-3\\0\end{pmatrix} &\quad \scriptsize \\[5pt]
\begin{pmatrix}-80\\40\\0\end{pmatrix}&=&-\dfrac{40}{3}\cdot\begin{pmatrix}6\\-3\\0\end{pmatrix}
\end{array}\)](https://www.schullv.de/resources/formulas/4636bcfc3a5403c86407b18739ac088c7ebae784885ea49ed9d6cefe8cef2f14_light.svg)
 ist diese Gleichung gelöst.
liegt somit auf der Schnittgeraden der Ebene mit der Würfeloberseite.
ist diese Gleichung gelöst.
liegt somit auf der Schnittgeraden der Ebene mit der Würfeloberseite.
1.3.2
1. Schritt: Verbindungsvektoren bestimmen
![\(\begin{array}[t]{rll}
\overrightarrow{LR}&=&\overrightarrow{OR}-\overrightarrow{OL} & \\[5pt]
&=& \begin{pmatrix}0\\3\\6\end{pmatrix}-\begin{pmatrix}-40\\23\\26\end{pmatrix}& \\[5pt]
&=& \begin{pmatrix}40\\-20\\-20\end{pmatrix}& \\[5pt]
\end{array}\)](https://www.schullv.de/resources/formulas/d55d4de9f7d1b818c278e65e3993858c3d8ada03fea7b1b653032f437c7d6b33_light.svg)
![\(\begin{array}[t]{rll}
\overrightarrow{PR}&=& \overrightarrow{OR}-\overrightarrow{OP}& \\[5pt]
&=& \begin{pmatrix}0\\3\\6\end{pmatrix}-\begin{pmatrix}20\\-7\\16\end{pmatrix}& \\[5pt]
&=& \begin{pmatrix}-20\\10\\-10\end{pmatrix}
\end{array}\)](https://www.schullv.de/resources/formulas/c03802b47ca994b4fd4e74818a5e6c23b25e48fa509969bc39cdd7ea0fc135b4_light.svg)
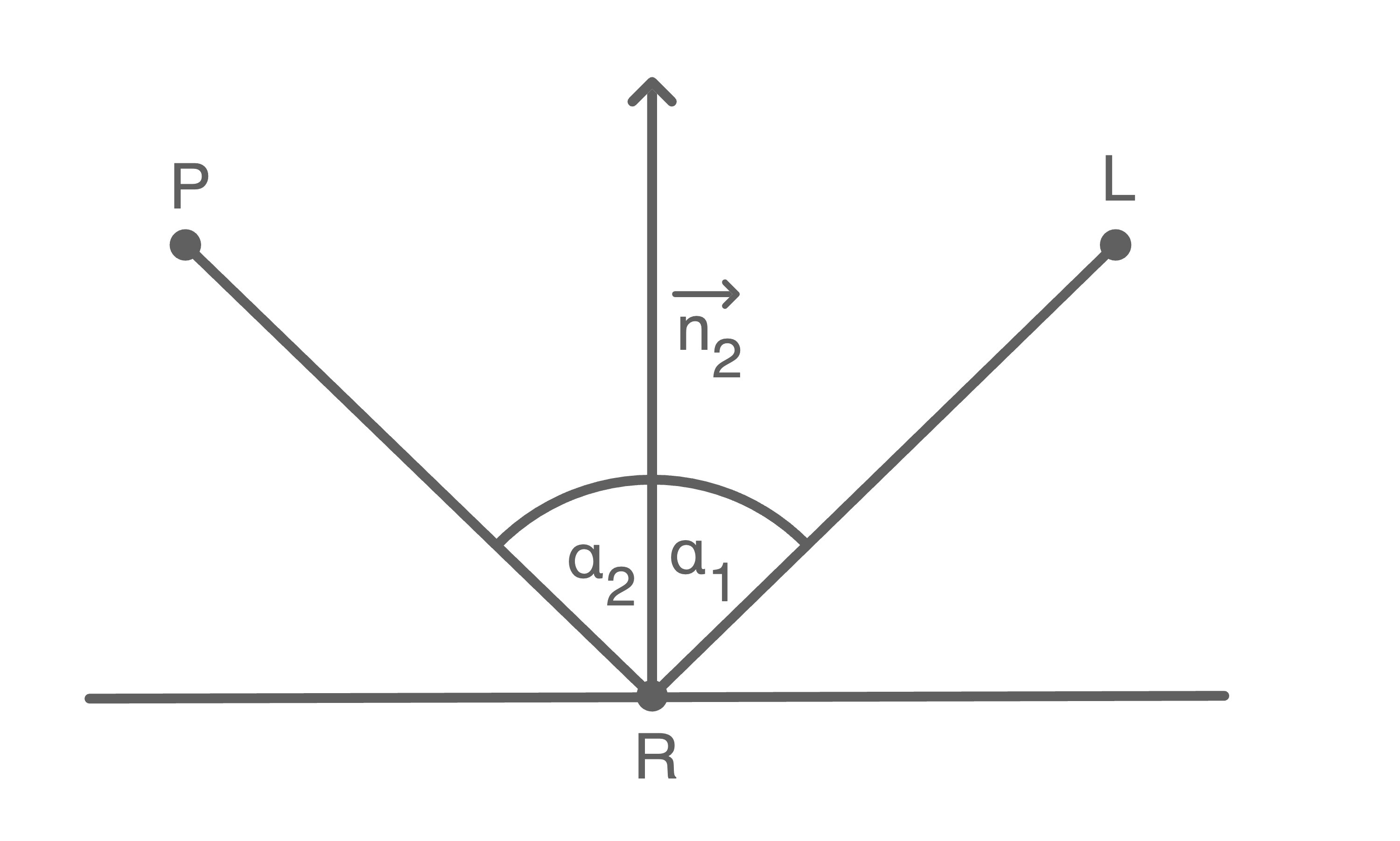
Hilfsskizze (nicht maßstäblich)
 berechnen
Es gilt:
3. Schritt: Winkel
berechnen
Es gilt:
3. Schritt: Winkel 
![\(\begin{array}[t]{rll}
\cos(\alpha_1)&=& \dfrac{\left| \overrightarrow{LR}\cdot \overrightarrow{n_2} \right|}{|\overrightarrow{LR}|\cdot|\overrightarrow{n_2}|}&\\[5pt]
\cos(\alpha_1)&=& \dfrac{\left| \begin{pmatrix}40\\-20\\-20\end{pmatrix}\cdot\begin{pmatrix}0\\0\\1\end{pmatrix} \right|}{\left|\begin{pmatrix}40\\-20\\-20\end{pmatrix}\right|\cdot\left|\begin{pmatrix}0\\0\\1\end{pmatrix}\right|}& \\[5pt]
\cos(\alpha_1)&=& \dfrac{20}{\left| \sqrt{2400} \right|}&\quad \scriptsize \mid\; \cos^{-1} \\[5pt]
\alpha_1&\approx& 65,9^\circ & \\[5pt]
\end{array}\)](https://www.schullv.de/resources/formulas/cc095e3cb735e5158eef591965ab95a96742e4e2ae20eafbcfe645654af2f71b_light.svg)
 berechnen
Wegen
berechnen
Wegen 
![\(\begin{array}[t]{rll}
\cos(\alpha_2)&=& \dfrac{\left| \overrightarrow{PR}\cdot \overrightarrow{n_2} \right|}{|\overrightarrow{PR}|\cdot|\overrightarrow{n_2}|}&\\[5pt]
\cos(\alpha_2)&=& \dfrac{\left| \begin{pmatrix}-20\\10\\-10\end{pmatrix}\cdot\begin{pmatrix}0\\0\\1\end{pmatrix} \right|}{\left|\begin{pmatrix}-20\\10\\-10\end{pmatrix}\right|\cdot\left|\begin{pmatrix}0\\0\\1\end{pmatrix}\right|}& \\[5pt]
\cos(\alpha_2)&=& \dfrac{10}{\left| \sqrt{600} \right|}&\quad \scriptsize \mid\; \cos^{-1} \\[5pt]
\alpha_2&\approx& 65,9^\circ & \\[5pt]
\end{array}\)](https://www.schullv.de/resources/formulas/f1337d11512e2e8c6981c52ffa5aebc755b9b115b4f8db9163013c962b6d0caa_light.svg)
 gilt
gilt  .
Damit ist der Winkel zwischen
.
Damit ist der Winkel zwischen  und identisch mit dem Winkel zwischen
und identisch mit dem Winkel zwischen  und
und 
2.1
soll den Vektor  mit drei Koordinaten in einen Vektor
mit drei Koordinaten in einen Vektor  mit zwei Koordinaten überführen. Also hat drei Spalten und zwei Zeilen:
mit zwei Koordinaten überführen. Also hat drei Spalten und zwei Zeilen:
 Es sind drei Bedingungen gegeben:
Bedingung 1:
Der Einheitsvektor
Es sind drei Bedingungen gegeben:
Bedingung 1:
Der Einheitsvektor  geht in den Vektor
geht in den Vektor  über:
über:
 Daraus folgt:
Bedingung 2:
Die
Daraus folgt:
Bedingung 2:
Die 
![\(\begin{array}[t]{rll}
c\cdot0+d\cdot1+e\cdot0 &=&1 &\Rightarrow d=1& &\quad \scriptsize \\[5pt]
f\cdot0+g\cdot1+h\cdot0 &=&0 &\Rightarrow g=0&\end{array}\)](https://www.schullv.de/resources/formulas/d2ccb981a400cec6ed35e96fb779457c0663b4c664d433154787fae31a992356_light.svg) -Achse des 2-D-Koordinatensystems deckt sich mit der -Achse des 3-D-Koordinatensystems.
-Achse des 2-D-Koordinatensystems deckt sich mit der -Achse des 3-D-Koordinatensystems.
Es muss also gelten:
 Daraus folgt:
Daraus folgt:
![\(\begin{array}[t]{rll}
c\cdot0+1\cdot0+e\cdot1&=&0 &\Rightarrow e=0 &\quad \scriptsize \\[5pt]
f\cdot0+0\cdot0+h\cdot1&=&1 &\Rightarrow h=1
\end{array}\)](https://www.schullv.de/resources/formulas/f36ee262eb5c13367dd1e8e1d6fa3c78c68a290dce9806a0ab2d507703c122cf_light.svg) Bedingung 3:
Aus dem Punkt
Bedingung 3:
Aus dem Punkt  wird der Punkt
wird der Punkt 
 Daraus folgt:
Daraus folgt:
![\(\begin{array}[t]{rll}
c\cdot(-4)+1\cdot6+0\cdot1&=& 8 &\Rightarrow c=-\dfrac{1}{2} &\quad \scriptsize \\[5pt]
f\cdot(-4)+0\cdot6+1\cdot1&=& 3 &\Rightarrow f=-\dfrac{1}{2}
\end{array}\)](https://www.schullv.de/resources/formulas/3d59157512c5d422f00ad918fe6480df106453146cfa2f0989e08b0daa9cf56d_light.svg) Insgesamt die Abbildungsmatrix also mit:
Insgesamt die Abbildungsmatrix also mit:

2.2
Hier werden durch die Matrix  zwei geometrische Abbildungen, die nacheinander ablaufen, in einem Schritt durchgeführt:
beschreibt somit eine Drehung im dreidimensionalen Raum um die -Achse, gefolgt von einer Abbildung in den zweidimensionalen Raum. Die genaue Drehung hängt von den Werten von
zwei geometrische Abbildungen, die nacheinander ablaufen, in einem Schritt durchgeführt:
beschreibt somit eine Drehung im dreidimensionalen Raum um die -Achse, gefolgt von einer Abbildung in den zweidimensionalen Raum. Die genaue Drehung hängt von den Werten von  ab.
ab.
zwei geometrische Abbildungen, die nacheinander ablaufen, in einem Schritt durchgeführt:
- Die Matrix
 führt eine Drehung im dreidimensionalen Raum um die z-Achse durch.
führt eine Drehung im dreidimensionalen Raum um die z-Achse durch. - Die Matrix bildet die resultierenden Koordinaten nach der Drehung vom dreidimensionalen in den zweidimensionalen Raum ab.
beschreibt somit eine Drehung im dreidimensionalen Raum um die -Achse, gefolgt von einer Abbildung in den zweidimensionalen Raum. Die genaue Drehung hängt von den Werten von ab.