Teil B
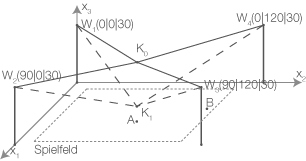
Für die Fernsehübertragung eines Fußballspiels wird über dem Spielfeld eine bewegliche Kamera installiert. Ein Seilzugsystem, das an vier Masten befestigt wird, hält die Kamera in der gewünschten Position. Seilwinden, welche die Seile koordiniert verkürzen und verlängern, ermöglichen eine Bewegung der Kamera.
In der Abbildung ist das horizontale Spielfeld modellhaft als Rechteck in der -Ebene eines kartesischen Koordinatensystems dargestellt. Die Punkte
-Ebene eines kartesischen Koordinatensystems dargestellt. Die Punkte  und
und  beschreiben die Positionen der vier Seilwinden. Eine Längeneinheit im Koordinatensystem entspricht
beschreiben die Positionen der vier Seilwinden. Eine Längeneinheit im Koordinatensystem entspricht  in der Realität, d.h. alle vier Seilwinden sind in einer Höhe von
in der Realität, d.h. alle vier Seilwinden sind in einer Höhe von  angebracht.
Der Punkt
angebracht.
Der Punkt  beschreibt die Lage des Anstoßpunkts auf dem Spielfeld. Die Kamera befindet sich zunächst in einer Höhe von
beschreibt die Lage des Anstoßpunkts auf dem Spielfeld. Die Kamera befindet sich zunächst in einer Höhe von  vertikal über dem Anstoßpunkt. Um den Anstoß zu filmen, wird die Kamera um
vertikal über dem Anstoßpunkt. Um den Anstoß zu filmen, wird die Kamera um  vertikal abgesenkt. In der Abbildung ist die ursprüngliche Kameraposition durch den Punkt
vertikal abgesenkt. In der Abbildung ist die ursprüngliche Kameraposition durch den Punkt  , die abgesenkte Position durch den Punkt
, die abgesenkte Position durch den Punkt  dargestellt.
dargestellt.
 über dem Spielfeld liegt. Im Modell wird der Zielpunkt durch den Punkt
über dem Spielfeld liegt. Im Modell wird der Zielpunkt durch den Punkt  beschrieben, die Bewegung der Kamera erfolgt vom Punkt entlang der Geraden
beschrieben, die Bewegung der Kamera erfolgt vom Punkt entlang der Geraden  mit der Gleichung
mit der Gleichung  zum Punkt .
zum Punkt .
 beschrieben.
beschrieben.
In der Abbildung ist das horizontale Spielfeld modellhaft als Rechteck in der
-Ebene eines kartesischen Koordinatensystems dargestellt. Die Punkte und beschreiben die Positionen der vier Seilwinden. Eine Längeneinheit im Koordinatensystem entspricht in der Realität, d.h. alle vier Seilwinden sind in einer Höhe von angebracht.
 beschreibt die Lage des Anstoßpunkts auf dem Spielfeld. Die Kamera befindet sich zunächst in einer Höhe von vertikal über dem Anstoßpunkt. Um den Anstoß zu filmen, wird die Kamera um vertikal abgesenkt. In der Abbildung ist die ursprüngliche Kameraposition durch den Punkt , die abgesenkte Position durch den Punkt dargestellt.
beschreibt die Lage des Anstoßpunkts auf dem Spielfeld. Die Kamera befindet sich zunächst in einer Höhe von vertikal über dem Anstoßpunkt. Um den Anstoß zu filmen, wird die Kamera um vertikal abgesenkt. In der Abbildung ist die ursprüngliche Kameraposition durch den Punkt , die abgesenkte Position durch den Punkt dargestellt.
a)
Berechne die Seillänge, die von jeder der vier Seilwinden abgerollt werden muss, um dieses Absenken zu ermöglichen, wenn man davon ausgeht, dass die Seile geradlinig verlaufen.
Kurze Zeit später legt sich ein Torhüter den Ball für einen Abstoß bereit. Der Abstoß soll von der Kamera aufgenommen werden. Durch das gleichzeitige Verlängern beziehungsweise Verkürzen der vier Seile wird die Kamera entlang einer geraden Bahn zu einem Zielpunkt bewegt, der in einer Höhe von
(4 BE)
über dem Spielfeld liegt. Im Modell wird der Zielpunkt durch den Punkt beschrieben, die Bewegung der Kamera erfolgt vom Punkt entlang der Geraden mit der Gleichung zum Punkt .
b)
Bestimme die Koordinaten von .
(Ergebnis:  )
)
.
(Ergebnis: )
(3 BE)
c)
Im Zielpunkt ist die Kamera zunächst senkrecht nach unten orientiert. Um die Position des Balls anzuvisieren, die im Modell durch den Punkt  beschrieben wird, muss die Kamera gedreht werden. Berechne die Größe des erforderlichen Drehwinkels.
beschrieben wird, muss die Kamera gedreht werden. Berechne die Größe des erforderlichen Drehwinkels.
Der Torwart führt den Abstoß aus. Der höchste Punkt der Flugbahn des Balls wird im Modell durch den Punkt beschrieben wird, muss die Kamera gedreht werden. Berechne die Größe des erforderlichen Drehwinkels.
(4 BE)
beschrieben.
d)
Ermittle eine Gleichung der durch die Punkte  und festgelegten Ebene
und festgelegten Ebene  in Normalenform und weise nach, dass
in Normalenform und weise nach, dass  unterhalb von liegt.
(Mögliches Teilergebnis:
unterhalb von liegt.
(Mögliches Teilergebnis:  )
)
und festgelegten Ebene in Normalenform und weise nach, dass unterhalb von liegt.
(Mögliches Teilergebnis: )
(7 BE)
e)
Mache plausibel, dass folgende allgemeine Schlussfolgerung falsch ist: „Liegen der Startpunkt und der anvisierte höchste Punkt einer Flugbahn des Balls im Modell unterhalb der Ebene , so kann der Ball entlang seiner Bahn die Seile, die durch ![\([W_1K_2]\)](https://www.schullv.de/resources/formulas/ac5720d75fbadde194f3132aa09f1a72ccf3fe18dabe37051fb56dd1d84d7ca2_light.svg) und
und ![\([W_2K_2]\)](https://www.schullv.de/resources/formulas/4c698bffcd575ffe5f1f190ca62e038a941dd745bbe71b68744ca0ca9b8888f4_light.svg) beschrieben werden, nicht berühren.“
beschrieben werden, nicht berühren.“
Bildnachweise [nach oben]
, so kann der Ball entlang seiner Bahn die Seile, die durch und beschrieben werden, nicht berühren.“
(2 BE)
© 2017 - SchulLV.
a)
 Benötigte Seillänge berechnen
Du sollst die benötigte Seillänge an den vier Masten zum Ablassen der Kamera berechnen. Da der Anstoßpunkt aufgrund der Koordinaten im Modell in der Mitte des Spielfelds liegt, ist diese benötigte Seillänge an allen vier Masten gleich.
Benötigte Seillänge berechnen
Du sollst die benötigte Seillänge an den vier Masten zum Ablassen der Kamera berechnen. Da der Anstoßpunkt aufgrund der Koordinaten im Modell in der Mitte des Spielfelds liegt, ist diese benötigte Seillänge an allen vier Masten gleich.
Betrachte also den Längenunterschied der beiden Strecken
![\(\left[W_1 K_0\right]\)](https://www.schullv.de/resources/formulas/2ad4a00413bb81cbb1c1ed520e51b9d57e402920be8c60e53586afd163806043_light.svg) und
und ![\(\left[W_1 K_1\right].\)](https://www.schullv.de/resources/formulas/18200c6bc0b1d27aee51962b8118c7598f91ada14c4f8878459e06752963cd17_light.svg) und beschreiben die Position der Kamera vertikal über dem Anstoßpunkt. Sie haben daher die gleiche
und beschreiben die Position der Kamera vertikal über dem Anstoßpunkt. Sie haben daher die gleiche  - und
- und  -Koordinaten wie
-Koordinaten wie  Die
Die  -Koordinate lässt sich aus der jeweiligen Höhe der Kamera über dem Anstoßpunkt ableiten.
-Koordinate lässt sich aus der jeweiligen Höhe der Kamera über dem Anstoßpunkt ableiten.
 und
und  Die Längen der beiden Strecken lassen sich über die Beträge der zugehörigen Verbindungsvektoren berechnen:
Die Längen der beiden Strecken lassen sich über die Beträge der zugehörigen Verbindungsvektoren berechnen:


![\(\begin{array}[t]{rll}
\left|\overrightarrow{ W_1K_0}\right|&=&\left| \pmatrix{45\\60\\25}-\pmatrix{0\\0\\30} \right| \\[5pt]
&=&\left| \pmatrix{45\\60\\-5}\right| \\[5pt]
&=&\sqrt{45^2+60^2+(-5)^2} \\[5pt]
&=& 5\cdot \sqrt{226} \\[5pt]
&\approx & 75,17
\end{array}\)](https://www.schullv.de/resources/formulas/68f76df2845687d3f492ad59bb59ea67c1bc6c0ff72cf4e43c53ac4f14cf713e_light.svg)

![\(\begin{array}[t]{rll}
\overrightarrow{ W_1K_1}&=& \left|\pmatrix{45\\60\\6}-\pmatrix{0\\0\\30}\right| \\[5pt]
&=& \left|\pmatrix{45\\60\\-24}\right| \\[5pt]
&=& \sqrt{45^2+60^2+(-24)^2} \\[5pt]
&=& 3\cdot \sqrt{689} \\[5pt]
&\approx & 78,75
\end{array}\)](https://www.schullv.de/resources/formulas/d2994e1bda1d8b99fcef5f130c83396d4fc08015a7d4d552c3d2a2d78449c738_light.svg)
 pro Mast ergibt sich aus der Differenz dieser beiden Abstände:
pro Mast ergibt sich aus der Differenz dieser beiden Abstände:
![\(\begin{array}[t]{rll}
l&=& 78,75-75,17 \\[5pt]
&=& 3,58
\end{array}\)](https://www.schullv.de/resources/formulas/688cfdbcb9b3fab952269b6836f05977749c83b124afc1f9f03b26ed0e948d71_light.svg) Pro Mast müssen
Pro Mast müssen  m Seillänge abgerollt werden.
m Seillänge abgerollt werden.
b)
Koordinaten von  ermitteln
Du sollst die Koordinaten von bestimmen. liegt auf der Geraden mit
ermitteln
Du sollst die Koordinaten von bestimmen. liegt auf der Geraden mit  .
.
Die Koordinaten von
hast du oben bereits bestimmt, die Geradengleichung lautet also:
 Der Zielpunkt befindet sich in einer Höhe von über dem Spielfeld, weshalb die
Der Zielpunkt befindet sich in einer Höhe von über dem Spielfeld, weshalb die  -Koordinate von
-Koordinate von  sein muss. Gleichsetzen liefert dann folgendes lineares Gleichungssystem:
sein muss. Gleichsetzen liefert dann folgendes lineares Gleichungssystem:
 Aus der dritten Gleichung ergibt sich:
Mit diesem Wert für
Aus der dritten Gleichung ergibt sich:
Mit diesem Wert für 
![\(\begin{array}[t]{rll}
\text{III}\quad 10&=& 6+2\lambda &\quad \scriptsize \mid\; -6 \\[5pt]
4&=& 2\lambda &\quad \scriptsize \mid\; :2 \\[5pt]
2&=& \lambda
\end{array}\)](https://www.schullv.de/resources/formulas/e8013c7d9bd9edd00d7db1bf3acd095d1e69c24be6af8955d3589069facb9f1d_light.svg)
 berechnest du die übrigen zwei Koordinaten.
Die Koordinaten von
berechnest du die übrigen zwei Koordinaten.
Die Koordinaten von ![\(\begin{array}[t]{rll}
x_1&=& 51 \\[10pt]
x_2&=& 100 \\[10pt]
\end{array}\)](https://www.schullv.de/resources/formulas/0a0911f10919cf503d368fae6130b3eb4d2a619c973fa8a61ce552e28a23952b_light.svg)
![\(\begin{array}[t]{rll}
\text{I}\quad x_1&=& 45+3\cdot 2 \\[5pt]
&=& 51 \\[10pt]
\text{II}\quad x_2&=& 60+20\cdot 2 \\[5pt]
&=& 100 \\[10pt]
\end{array}\)](https://www.schullv.de/resources/formulas/1e721dda5d5bf7c3ec3c08a46d93b0ee4c37016493b069e04d678cca083f0e7b_light.svg) sind
sind  .
.
c)
Drehwinkel zum Ball berechnen
Du sollst berechnen, um welchen Drehwinkel die Kamera gedreht werden muss, damit sie den Ball auf  anvisiert.
Die beiden Blickrichtungen der Kamera können durch zwei Geraden dargestellt werden. Gesucht ist dann die Größe des Schnittwinkels dieser beiden Geraden.
Dieser kann mithilfe der beiden Richtungsvektoren
anvisiert.
Die beiden Blickrichtungen der Kamera können durch zwei Geraden dargestellt werden. Gesucht ist dann die Größe des Schnittwinkels dieser beiden Geraden.
Dieser kann mithilfe der beiden Richtungsvektoren  und
und  mit folgender Formel berechnet werden:
mit folgender Formel berechnet werden:

 Sie befindet sich im Punkt und soll in Richtung des Ballpunkts
Sie befindet sich im Punkt und soll in Richtung des Ballpunkts  gedreht werden. Die gewünschte Blickrichtung wird also durch den Vektor
gedreht werden. Die gewünschte Blickrichtung wird also durch den Vektor  beschrieben:
beschrieben:
![\(\begin{array}[t]{rll}
\overrightarrow{r}_2 &=& \overrightarrow{K_2B} \\[5pt]
&=& \pmatrix{-11\\5\\-10} \\[5pt]
\end{array}\)](https://www.schullv.de/resources/formulas/4d5832b2e8a006ae650975ee6cf258c33bdf05fb833ac350062584f11c286175_light.svg) Einsetzen der beiden Richtungsvektoren liefert:
Die Kamera muss um einen Winkel von ca.
Einsetzen der beiden Richtungsvektoren liefert:
Die Kamera muss um einen Winkel von ca. 
![\(\begin{array}[t]{rll}
\cos \alpha &=& \dfrac{\left|\pmatrix{0\\0\\-1} \circ\pmatrix{-11\\5\\-10} \right|}{\left|\pmatrix{0\\0\\-1} \right| \cdot \left| \pmatrix{-11\\5\\-10} \right|}\\[5pt]
\cos \alpha &=& \dfrac{10 }{1 \cdot \sqrt{(-11)^2+5^2 + (-10)^2} } \\[5pt]
\cos \alpha&=& \dfrac{10 }{\sqrt{246} }&\quad \scriptsize \mid\; \cos^{-1} \\[5pt]
\alpha&\approx& 50,39^{\circ}
\end{array}\)](https://www.schullv.de/resources/formulas/c84c48dce93fcb70bc84e45ce3aff0b3488a844ac821b6499a468bbefdade7a5_light.svg)
 gedreht werden.
gedreht werden.
d)
Ebenengleichung ermitteln
Du sollst eine Ebenengleichung für die Ebene in Normalenform ermitteln, die die drei Punkte  ,
,  und enthält. Mit dem Kreuzprodukt zweier Verbindungsvektoren der drei Punkte kannst du einen Normalenvektor von berechnen:
und enthält. Mit dem Kreuzprodukt zweier Verbindungsvektoren der drei Punkte kannst du einen Normalenvektor von berechnen:


![\(\begin{array}[t]{rll}
\overrightarrow{n} &=& \overrightarrow{W_1 W_2}\times \overrightarrow{K_2 W_1} \\[5pt]
&=& \pmatrix{90\\0\\0}\times\pmatrix{-51\\-100\\20} \\[5pt]
&=& \pmatrix{0\cdot 20 -0\cdot (-100)\\ 0\cdot (-51) - 90\cdot 20 \\ 90\cdot (-100) -0\cdot (-51)}\\[5pt]
&=& \pmatrix{0\\-1.800\\-9.000}\\[5pt]
&=& -1.800\cdot \pmatrix{0\\1\\5}
\end{array}\)](https://www.schullv.de/resources/formulas/2d466df7d75bef081a3f2ef94ad4e61b91eb540cbbe2253f9bd49a3b62de14e6_light.svg)
 verwendet werden. Die Ebenengleichung hat daher folgende vorläufige Form:
verwendet werden. Die Ebenengleichung hat daher folgende vorläufige Form:
 Um die Konstante
Um die Konstante  zu ermitteln, kannst du die Koordinaten eines Punkts in der Ebene in die Gleichung einsetzen, beispielsweise die Koordinaten von
zu ermitteln, kannst du die Koordinaten eines Punkts in der Ebene in die Gleichung einsetzen, beispielsweise die Koordinaten von  Eine Gleichung der Ebene
Eine Gleichung der Ebene 
![\(\begin{array}[t]{rll}
0\cdot x_1 + 1\cdot x_2+5\cdot x_3 - d &=& 0 \\[5pt]
0\cdot 0 + 1\cdot 0+5\cdot 30 - d &=& 0 \\[5pt]
150 - d &=& 0&\quad \scriptsize \mid\; - d \\[5pt]
150 &=& d \\[5pt]
\end{array}\)](https://www.schullv.de/resources/formulas/d39deafc63d3e23d76e584dda913fb3ce8bf55270c2fe656abf88613b9ac4bd5_light.svg) in Normalenform lautet also:
in Normalenform lautet also:

 liegt unterhalb der Ebene nachweisen
Du sollst nachweisen, dass unterhalb der Ebene liegt. Berechne dazu die -Koordinate des Punkts, der senkrecht oberhalb von aber in der Ebene liegt. Dieser hat dieselbe - und -Koordinaten wie
liegt unterhalb der Ebene nachweisen
Du sollst nachweisen, dass unterhalb der Ebene liegt. Berechne dazu die -Koordinate des Punkts, der senkrecht oberhalb von aber in der Ebene liegt. Dieser hat dieselbe - und -Koordinaten wie  Setze dazu die - und -Koordinaten von in die Ebenengleichung ein und berechne .
Die
Setze dazu die - und -Koordinaten von in die Ebenengleichung ein und berechne .
Die 
![\(\begin{array}[t]{rll}
150 &=& 70+5\cdot x_3 &\quad \scriptsize \mid\; -70 \\[5pt]
80&=& 5\cdot x_3 &\quad \scriptsize \mid\; :5 \\[5pt]
16&=& x_3
\end{array}\)](https://www.schullv.de/resources/formulas/ef76bebcdf480acfdbf2db6e5dede00f10a2bfe3e9feacd05648f2faac300494_light.svg) -Koordinate des Punktes in der Ebene mit
-Koordinate des Punktes in der Ebene mit  und
und  beträgt
beträgt  . Die -Koordinate von beträgt allerdings nur
. Die -Koordinate von beträgt allerdings nur  , somit liegt unterhalb der Ebene .
, somit liegt unterhalb der Ebene .
e)
Plausibel machen, dass die Schlussfolgerung falsch ist
Du sollst begründen, dass folgende Aussage falsch ist:
Wenn der Startpunkt und der höchste Punkt der Flugbahn eines Balls im Modell unterhalb der Ebene liegen, trifft der Ball die Seile, die im Modell die Endpunkte und bzw. und haben, nicht.
Überlege dir dazu ein Gegenbeispiel, indem du den Sachverhalt auf zwei Dimensionen herunterbrichst.
In der Skizze stellt die Gerade den Verlauf der Ebene dar. Die Parabel beschreibt die parabelförmige Flugbahn des Balls. Sowohl der Startpunkt  als auch der höchste Punkt, der Scheitelpunkt der Parabel
als auch der höchste Punkt, der Scheitelpunkt der Parabel  liegen unterhalb der Ebene
liegen unterhalb der Ebene 
dar. Die Parabel beschreibt die parabelförmige Flugbahn des Balls. Sowohl der Startpunkt als auch der höchste Punkt, der Scheitelpunkt der Parabel liegen unterhalb der Ebene
 Abb. 1: Skizze
Abb. 1: Skizze
 schneiden sich Gerade und Parabel. Die Flugbahn würde in dem Fall also trotzdem die Ebene, in der die Seile liegen durchkreuzen und kann damit auch die Seile treffen.
schneiden sich Gerade und Parabel. Die Flugbahn würde in dem Fall also trotzdem die Ebene, in der die Seile liegen durchkreuzen und kann damit auch die Seile treffen.
Das liegt an der Neigung der Ebene
zur -Ebene. Wäre parallel zur -Ebene, wäre die Aussage richtig.
© 2017 - SchulLV.